Siemens ET6 RM - Manuels
Siemens ET6 RM - Manuel d'utilisation en ligne au format PDF.
Manuels:
Manuel d'utilisation Siemens ET6 RM

































































Résumé
- 2 - TABLE DES MATIERES TABLE DES MATIERES ......................................................................................................... 2 1. PROGRAMMATION DE L'AUTOMATE SIEMENS S7-400 ............................................ 5 1.1 PRINCIPE DE LA PROGRAMMATION EN S7 ...................
- 5 - 1. PROGRAMMATION DE L'AUTOMATE SIEMENS S7-400 Le laboratoire de robotique et automatisation dispose de plusieurs automates ou PCs équipés de carte PLC programmables sous le logiciel Siemens S7. Les caractéristiques principales des automates programmables industriels (API) Siemens S7-400 sont l...
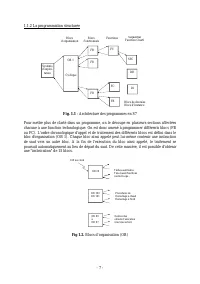
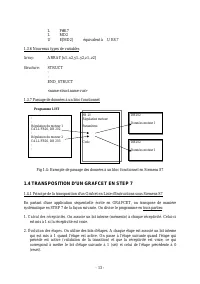
- 8 - 1.1.3 Les structure des données • Les blocs de données: DB Il s'agit de blocs de données (et pas des blocs d’instructions !) composés de mot de 16 bits (DW) dans lesquels on peut lire et écrire des données. Fig. 1.3 : Bloc de données DB en Step 7 Un bloc de données ouvert reste valide jusqu’à ...
Siemens Manuels
-
 Siemens 2010
Manuel d'utilisation
Siemens 2010
Manuel d'utilisation
-
 Siemens 30inc iSlide Single Oven
Manuel d'utilisation
Siemens 30inc iSlide Single Oven
Manuel d'utilisation
-
 Siemens 30inc Stainless Gas Cooktop
Manuel d'utilisation
Siemens 30inc Stainless Gas Cooktop
Manuel d'utilisation
-
 Siemens 576.056A
Manuel d'utilisation
Siemens 576.056A
Manuel d'utilisation
-
 Siemens 8770 Curvy
Manuel d'utilisation
Siemens 8770 Curvy
Manuel d'utilisation
-
 Siemens BB 12-01
Notice
Siemens BB 12-01
Notice
-
 Siemens CIELO 2 ACTIVE
Manuel d'utilisation
Siemens CIELO 2 ACTIVE
Manuel d'utilisation
-
 Siemens CMTC1515
Manuel d'utilisation
Siemens CMTC1515
Manuel d'utilisation
-
 Siemens Codelock K44 Duo
Manuel d'utilisation
Siemens Codelock K44 Duo
Manuel d'utilisation
-
 Siemens DE08101
Manuel d'utilisation
Siemens DE08101
Manuel d'utilisation
-
 Siemens DE1821415
Manuel d'utilisation
Siemens DE1821415
Manuel d'utilisation
-
 Siemens DE1821515
Manuel d'utilisation
Siemens DE1821515
Manuel d'utilisation
-
 Siemens DE18401
Manuel d'utilisation
Siemens DE18401
Manuel d'utilisation
-
 Siemens DE2427415
Manuel d'utilisation
Siemens DE2427415
Manuel d'utilisation
-
 Siemens DE2427515
Manuel d'utilisation
Siemens DE2427515
Manuel d'utilisation
-
 Siemens DE2427555
Manuel d'utilisation
Siemens DE2427555
Manuel d'utilisation
-
 Siemens DH18100
Manuel d'utilisation
Siemens DH18100
Manuel d'utilisation
-
 Siemens DK-9490
Manuel d'utilisation
Siemens DK-9490
Manuel d'utilisation
-
 Siemens DO05755K
Manuel d'utilisation
Siemens DO05755K
Manuel d'utilisation
-
 Siemens EB612PB90E
Manuel d'utilisation
Siemens EB612PB90E
Manuel d'utilisation