Page 2 - TABLE DES MATIERES
- 2 - TABLE DES MATIERES TABLE DES MATIERES ......................................................................................................... 2 1. PROGRAMMATION DE L'AUTOMATE SIEMENS S7-400 ............................................ 5 1.1 PRINCIPE DE LA PROGRAMMATION EN S7 ...................
Page 5 - PRINCIPE DE LA PROGRAMMATION EN S7
- 5 - 1. PROGRAMMATION DE L'AUTOMATE SIEMENS S7-400 Le laboratoire de robotique et automatisation dispose de plusieurs automates ou PCs équipés de carte PLC programmables sous le logiciel Siemens S7. Les caractéristiques principales des automates programmables industriels (API) Siemens S7-400 sont l...
Page 8 - TYPES DE VARIABLES
- 8 - 1.1.3 Les structure des données • Les blocs de données: DB Il s'agit de blocs de données (et pas des blocs d’instructions !) composés de mot de 16 bits (DW) dans lesquels on peut lire et écrire des données. Fig. 1.3 : Bloc de données DB en Step 7 Un bloc de données ouvert reste valide jusqu’à ...
Page 12 - TRANSPOSITION D’UN GRAFCET EN STEP 7; est mis à 1 si la réceptivité est vraie.
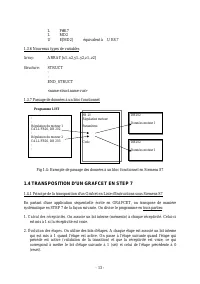
- 13 - L P#8.7 L MD2 U E[MD2] équivalent à U E8.7 1.3.6 Nouveaux types de variables Array: ARRAY[x1..x2,y1..y2,z1..z2] Structure: STRUCT : : END_STRUCT <name-struct.name-var> 1.3.7 Passage de données à un bloc fonctionnel Fig 1.4: Exemple de passage des données à un bloc fonctionnel en Siemens...
Page 15 - UTILISATION DE LA CONSOLE
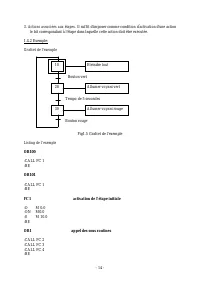
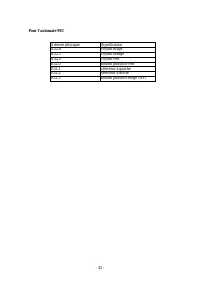
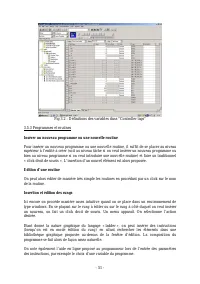
- 16 - Remarques. Lorsque l'on veut traduire du GRAFCET en STEP7, il est très important de bien structurer son programme, sinon celui-ci devient très vite lourd et impossible à débugger. On utilisera par exemple un FC pour calculer toutes les réceptivités, un autre pour la mise à jour des bits d'éta...
Page 16 - à la table des mnémoniques (fichier Mnémoniques)
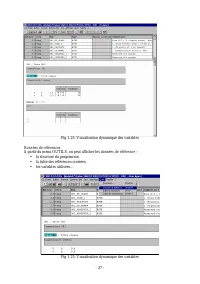
- 17 - niveaux: - Au niveau 1, on trouve le nom de projet (ex : balle97). Le projet contient d'une part les stations connectées (Station SIMATIC 400 1) et le ou les réseaux configurés (réseau MPI (1)). - Au niveau 2, on accède à la définition de la station : le type de CPU (CPU 413-2 DP) et la stati...
Page 25 - Fig 1.24: Visualisation et forçage des variables
- 26 - Fig 1.23: Démarrage / arrêt de l'automate Visualisation et forçage des variables Fig 1.24: Visualisation et forçage des variables Cet outil permet de visualiser en ligne (online) la valeur des différentes variables (entrées, sorties...) et de forcer la valeur des sorties et des variables inte...
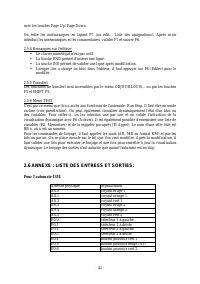
Page 27 - ANNEXE : LISTE DES ENTREES ET SORTIES DES AUTOMATES; Module
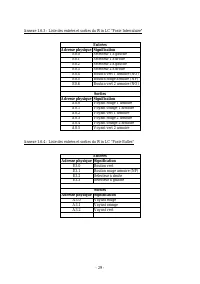
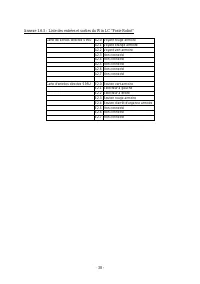
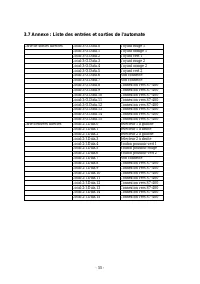
- 28 - 1.6 ANNEXE : LISTE DES ENTREES ET SORTIES DES AUTOMATES Annexe 1.6.1 : Configuration de l'automate S7-400: Emplacement Module N° de référence Type 0 UR2 (chassis universel) 6ES7 400-1JA00-0AA0 RACK-400 1 PS-405 4A (alimentation) 6FS7 405-0DA00-0AA0 PS-400 2 CPU4I3-2DP (CPU + DP master) 6ES7 4...
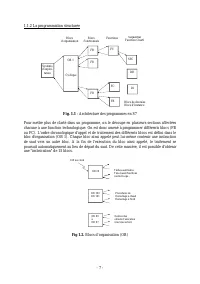
Page 32 - Fig 2.1 Structure des programmes en STEP 5
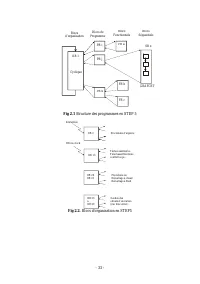
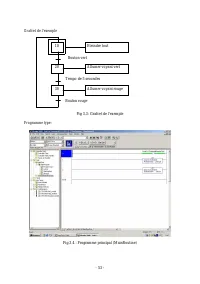
- 33 - Fig 2.1 Structure des programmes en STEP 5 OB 2 OB 13 OB 20OB 21 OB 23àOB 39 100 ms clock Tâches auxiliaires:Time based functionscontrol loops... Procédures d’urgence Procédures deDémarrage à chaud Démarrage à froid Gestion deserreurs d’exécution(run time errors) Interuption Fig 2.2. Blocs d'...
Page 33 - Fig 2.3 Block de données en STEP5
- 34 - Les appels de bloc ("SPA" et "SPB") permettent d'appeler les blocs de programme pour execution. Nous pouvons programmer des appels de blocs dans des blocs d'organisation (OB), des blocs de programme PB et des blocs fonctionnels. Les appels de blocs sont comparables à des appel...
Page 35 - TRANSPOSITION D’UN GRAFCET EN STEP 5
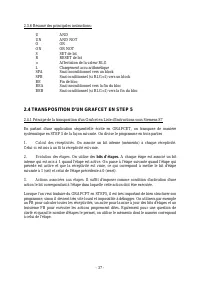
- 37 - 2.3.6 Résumé des principales instructions: U AND UN AND NOT O OR ON OR NOT S SET de bit R RESET de bit = Affectation de la valeur RLG L Chargement accu arithmétique SPA Saut inconditionnel vers un block SPB Saut conditionnel (si RLG=1) vers un block BE Fin de bloc BEA Saut inconditionnel vers...
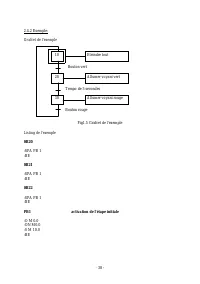
Page 36 - activation de l'étape initiale
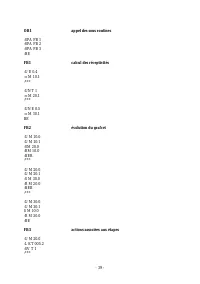
- 38 - 2.4.2 Exemple: Grafcet de l'exemple Fig1.5 Grafcet de l'exemple Listing de l'exemple 0B20 :SPA PB 1 :BE 0B21 :SPA PB 1 :BE 0B22 :SPA PB 1 :BE PB1 activation de l'étape initiale :O M 0.0 :ON M0.0 :S M 10.0 :BE 10 20 30 Eteindre tout Allumer voyant vert Allumer voyant rouge Bouton vert Tempo de...
Page 39 - Actions
- 41 - :R M20.0 Désactiver étape 20 :*** :U M 30.2 Transition 30 à 10 0K :S M 10.0 Activer étape 10 :R M 30.0 Désactiver étape 30 :BE FB4: Actions Rien de changé par rapport au listing ci avant. Pour le bloc où sont exécutées les actions, deux possibilités d'organisations sont possibles: 1. On trie ...
Page 42 - AUTOMATES ALLEN BRADLY CONTROL LOGIX 5550; CARACTÉRISTIQUES PRINCIPALES
- 44 - 3. AUTOMATES ALLEN BRADLY CONTROL LOGIX 5550 3.1 CARACTÉRISTIQUES PRINCIPALES Processeurs : – logique Logix 5550 avec 512 KB de RAM – de communication DeviceNet 1756-DNB Communications – RS 232 pour la programmation Réseaux: – DH+ – RIO (Remote I/O) – Ethernet TCP/IP – DeviceNet – ControlNet ...
Page 43 - I est mis pour entrées et O pour sorties,
- 45 - 3.3 LES VARIABLES 3.3.1 Adressage des variables L’adressage complet L’adressage se fait en suivant la logique du matériel. Par exemple, dans la variable Local: 2:I.Data.11, on a: • 2 = numéro de l’emplacement de la carte sur le rack (sur notre matériel 1 = Devicenet, 2 = carte d’entrées, 3 = ...
Page 44 - REAL; Nombre (réel) en virgule flottante codé sur 4 octets
- 46 - REAL Nombre (réel) en virgule flottante codé sur 4 octets Valeurs de -3,402823E38 à -1,1754944E-38 (valeurs négatives), 0 et de 1,175499E-38 à 3,402823E38 (valeurs positives) Remarque: Les types de données sont conformes aux types définis dans la norme IEC 1131-3 Conversions Il est possible d...
Page 45 - PRINCIPALES INSTRUCTIONS DU LANGAGE LADDER
- 47 - Allocation de memoire Les bits de poids fort sont placés en premier lieu dans les adresses de la mémoire. 3.3.5 Concept de structure Adressage des variables dans les structures Un exemple typique de structure est fournit par les temporisations. L'accès aux différentes composantes est réalisé ...
Page 47 - Utilisation du logiciel RS Logix 5550
- 49 - 3.4.10 Activation du module DeviceNet |-------------() Local :1 :O.CommandRegister.Run (à placer dans la routine Main) 3.4.11 Instructions de communications MSG 3.4.12 Principales instructions de programmation Comparaison: Bloc EQU EQUAL source A et source B Affectation: Bloc MOV MOVE source ...
Page 48 - Fig 3.1: Architecture des projets RS Logix
- 50 - Fig 3.1: Architecture des projets RS Logix 3.5.2 Définition et introduction d’une variable Les variables portent le nom de « tags ». Les tags sont soit des variables du systèmes (entrées – sorties directes ou déportées) soit des variables internes (pointeur d'étape, etc.). En ce qui concerne ...
Page 54 - AUTOMATE SCHNEIDER – TELEMECANIQUE; Caractéristiques principales de l’automate
- 56 - 4 AUTOMATE SCHNEIDER – TELEMECANIQUE Nous disposons au laboratoire d'un automate Schneider-Telemecanique TSX Premium 57. 4.1 Caractéristiques principales de l’automate Alimentation de type PSY 2600M (100 …240 VAC) Processeur TSX P 57 252 V3.3 • Mémoire RAM interne : 64 K mots • Nombre maximum...
Page 59 - Les modules d’ entrées / sorties déportées
- 61 - 4.6 Les modules d’ entrées / sorties déportées 4.6.1 Les modules de sorties déportées TBX DES 16C22 Lorsque l’on clique sur un module de sorties déportées, la fenêtre suivante apparaît : On peut y définir des mnémoniques et y activer des contrôles de filerie qui permettent de détecter les ano...
Page 60 - Visualisation et forçage de variables
- 62 - On peut y définir des mnémoniques et y activer des contrôles de filerie qui permettent de détecter les anomalies de raccordement (ces contrôles ne fonctionnent pas avec les capteurs présents sur le réseau, donc nous ne les utiliserons pas). 4.7. Visualisation et forçage de variables Sous la r...
Page 63 - Symbole
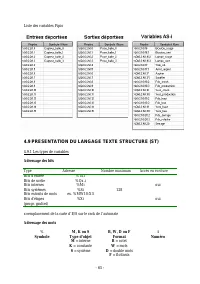
- 65 - Liste des variables Fipio 4.9 PRESENTATION DU LANGAGE TEXTE STRUCTURE (ST) 4.9.1 Les types de variables Adressage des bits Type Adresse Nombre maximum Accès en écriture Bits d'entrée % Ix.i Bits de sortie %Qx.i Bits internes %Mi oui Bits systèmes %Si 128 Bits extraits de mots ex. %MW10:X5 Bit...
Page 65 - Utilisation de la tempo
- 67 - Attention: mettre les arguments entre [ ] Opérations arithmétiques +, -, *, / Opérations logiques sur les mots AND, OR, XOR, CPL (compléments) 4.9.4 Temporisations Arrêt de la tempo STOP %TM0 Armement de la tempo %TM0.P:= 20; DOWN %TM0 Démarrage tempo START %TM0 Utilisation de la tempo %Q2.2:...
Page 66 - Exemple de grafcet
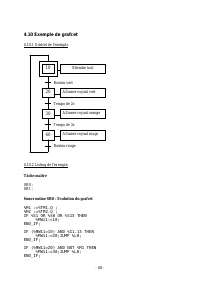
- 68 - 4.10 Exemple de grafcet 4.10.1 Grafcet de l'exemple 4.10.2 Listing de l'exemple Tâche maître SR0 ; SR1 ; Sous-routine SR0 : Evolution du grafcet %M1 :=%TM1.Q ; %M2 :=%TM2.Q ; IF %S1 OR %S0 OR %S13 THEN %MW11:=10; END_IF; IF (%MW11=10) AND %I1.13 THEN %MW11:=20;JUMP %L0; END_IF; IF (%MW11=20) ...
Page 67 - PRESENTATION DU ROBOT
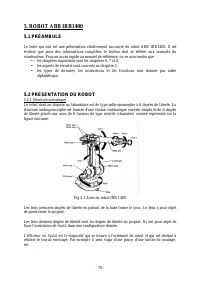
- 70 - 5. ROBOT ABB IRB1400 5.1 PRÉAMBULE Le texte qui suit est une présentation relativement succincte du robot ABB IRB1400. Il est évident que pour des informations complètes le lecteur doit se référer aux manuels du constructeur. Pour un accès rapide au manuel de référence, on se souviendra que •...
Page 68 - Fig 5.2 : Espace de travail du robot IRB1400
- 71 - 5.2.2 L'espace de travail: L'espace de travail d'un robot est l’ensemble des positions et orientations accessibles par un repère particulier lié à l’organe terminal du robot lorsque les paramètres articulaires prennent toutes les valeurs permises. Il s'agit donc d'un espace à 6 dimensions (3 ...
Page 69 - Fig 5.3: Diagramme de charge du robot IRB1400; SYSTEMES DE COORDONNEES
- 72 - 5.2.3 Diagramme de charge La charge de travail du robot est évidemment limitée par sa constitution mécanique et par la capacité de ses actuateurs et des éléments du système de transmission. La figure suivante montre la capacité du robot IRB1400. Bien évidemment la charge, mais aussi son posit...
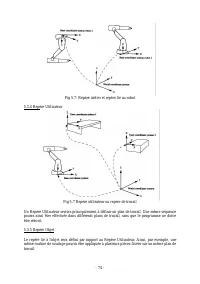
Page 72 - Fig. 5.9: Définition des repères Utilisateur et des repères Objet
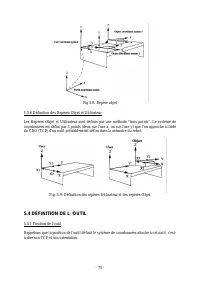
- 75 - Fig 5.8: Repère objet 5.3.6 Définition des Repères Objet et Utilisateur Les Repères Objet et Utilisateur sont définis par une méthode "trois points". Le système de coordonnées est défini par 3 points (deux sur l'axe x, un sur l'axe y) que l'on approche à l'aide du CDO (TCP) d'un outil...
Page 73 - Fig. 5.11 Axes de référence situés sur le flasque du poignet
- 76 - Fig 5. 10 Centre d'outil et du repère de l'outil Par défaut, le centre d'outil et un repère sont placés au centre du flasque du poignet. Ce repère et ce système d'axes sont appelés tool0. Fig. 5.11 Axes de référence situés sur le flasque du poignet La procédure de définition de définition de ...
Page 75 - CONSOLE DE CONTROLE
- 78 - Comment créer un nouveau TCP (CDO - Tool)? 1. On va dans la fenêtre "Jogging" 2. On place le curseur sur "tool" 3. On enfonce ensuite la touche "enter" 4. On fait "New" (attention à la déclaration!) 5. On choisit "Define" 6. On choisit une des différent...
Page 81 - MOVEL; le point d'arrivée est mémorisé dans l'instruction
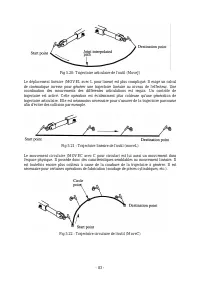
- 84 - Fig 5.23 : Paramètres d'une commande de trajectoire circulaire MoveC Syntaxe d'une opération de déplacement Les instructions suivantes réalisent le déplacement du CDO et de son système d'axes (définis pour l'outil mentionné) à partir du point courant vers le point d'arrivée spécifié (position...
Page 82 - MOVEL Offs
- 85 - Fig 5.24 : Notion de point de passage et de zone de transition (z) Fig 5.25 : Zone de transition entre deux trajectoires articulaires Fig 5.26 : Zone de transition entre deux trajectoires linéaires Mouvements relatifs Une manière très agréable de travailler et de construire des procédures réc...
Page 83 - MOVEL Reltool
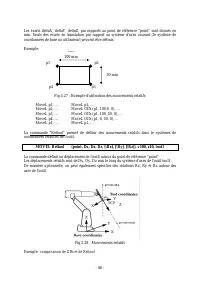
- 86 - Les écarts deltaX, deltaY, deltaZ, par rapports au point de référence "point" sont donnés en mm. Seuls des écarts en translation par rapport au système d'axes courant (le système de coordonnées de base ou utilisateur) peuvent être définis. Exemple: Fig 5.27 : Exemple d'utilisation des...
Page 84 - Reset do1
- 87 - MoveL Offs (p10, 0, 0, 100), v1000, fine, tool1 Le point p10 va trouver 100 mm en z par rapport au point d'origine suivant le système de coordonnées de base (dans ce cas ci) ou utilisateur. MoveL Reltool (p10, 0, 0, 100), v1000, fine, tool1 Le point p10 va trouver 100 mm en z par rapport au p...
Page 86 - ANNEXE 5.1 FAIRE UN BACKUP SUR LES ROBOTS ABB; de manière individuelle.
- 89 - ANNEXE 5.1 FAIRE UN BACKUP SUR LES ROBOTS ABB Les sauvegardes doivent être faites sur une disquette format 1.44. Les fichiers suivants peuvent être sauvegardés: 1. Les paramètres systèmes 2. Les programmes 3. Les modules (program module & system module) Il y a 2 possibilités: 1. Backup to...
Page 87 - ANNEXE 5.2 LISTE DES INSTRUCTIONS DISPONIBLES
- 90 - 2. Programmes 1. Enfoncer la touche Pro gram. 2. Enfoncer dans le coin supérieur gauche la touche file. 3. Sélectionner 4 Save Pro gram As. 4. Vérifier si le lecteur de disquette est sélectionné, sinon utiliser la touche Unit en bas à gauche pour sélectionner le lecteur. 5. Enfoncer le touche...
Page 88 - ANNEXE 5.3 CONFIGURATIONS DU ROBOT
- 92 - TPWrite Writes on the teach pendant VelSet Charges the programmed velocity WaitDI Waits until a digital input is met WaitTime Waits a given amount of time WaitUntil Waits until a condition is met WHILE Repeats as long as... Write Writes to a character-based file or serial channel WriteBin Wri...
Page 89 - ANNEXE 5.4 SINGULARITES DU ROBOT; à la vitesse de l’outil x
- 93 - Généralement on souhaite conserver la même posture du robot tout en cours d'exécution d'un mouvement. Pour cela il faut spécifier dans la programmation la posture (configuration) afin que le programme vérifie la configuration qui va être adoptée. Si la posture n'est pas vérifiée, on peut assi...
Page 91 - ANNEXE 5.5 REPRESENTATION DES ROTATIONS
- 95 - ANNEXE 5.5 REPRESENTATION DES ROTATIONS L'effecteur, considéré comme un corps rigide, nécessite la connaissance des coordonnées de 3 points non alignés. L'hypothèse de rigidité implique 3 contraintes de distances entre chacun de ceux-ci. Il en résulte que la localisation de l'effecteur peut ê...